
06.05.27 レゴ
昨日、教授から突然、「今度の水曜日に、授業でレゴ作って見せてやれ」と言われた。
レゴ…。来週!?
あんまり時間がないじゃないか。
とは言いつつ、ゼミの準備が飽きたので、作って遊んでました。

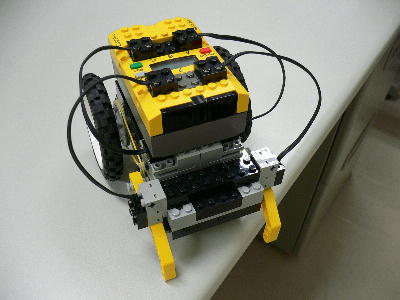
手前の黄色いアームが接触センサにつながっていて、地面の有無を検出。
机の端まで走っていって、落ちそうになると止まって向きを変えてまた走る。
こんな動きをイメージしました。
でも、ここで問題点。

向きを変えるときに少しバックするようにしたいが、この写真みたいになると落ちる…。
バックするのは前に落ちそうになったときだけだから、大丈夫なのかな。
ところでもう一つ問題点。
実は肝心の電池がない…。
と言うわけで動作検証は後日。
あんまり時間がないじゃないか。
とは言いつつ、ゼミの準備が飽きたので、作って遊んでました。
手前の黄色いアームが接触センサにつながっていて、地面の有無を検出。
机の端まで走っていって、落ちそうになると止まって向きを変えてまた走る。
こんな動きをイメージしました。
でも、ここで問題点。
向きを変えるときに少しバックするようにしたいが、この写真みたいになると落ちる…。
バックするのは前に落ちそうになったときだけだから、大丈夫なのかな。
ところでもう一つ問題点。
実は肝心の電池がない…。
と言うわけで動作検証は後日。








